Пресс-центр
БОЕВЫЕ НАЗЕМНЫЕ РОБОТОТЕХНИЧЕСКИЕ СРЕДСТВА В МОТОСТРЕЛКОВЫХ ПОДРАЗДЕЛЕНИЯХ: ОБОСНОВАНИЕ ИНТЕГРАЦИИ И ВАРИАНТЫ ПРИМЕНЕНИЯ
Публикация

Г.Н. БАЙСЕИТОВ1,
Н.А. БЕЛЬГИБЕКОВ1,
Д.Д. КАСЕНОВ2,
ТОО «R&D центр «Казахстан инжиниринг», г. Нур-Султан
Департамент военного образования и науки МО РК, г. Нур-Султан
Аннотация. В статье обоснована необходимость интеграции боевых наземных робототехнических средств в мотострелковые подразделения для частичной замены солдата-пехотинца на поле боя. Предложены тактико-технические характеристики, которыми должен обладать прототип боевого наземного робототехнического средства для качественного выполнения задач в составе мотострелкового подразделения.
Рассмотрены варианты применения боевых наземных робототехнических средств в составе мотострелковых отделений в наступательном и оборонительном бою. Боевые НРТС в составе мотострелковых подразделений могут применяться как при наступательном, так и при оборонительном бою. При этом по результатам испытаний отечественные образцы боевых роботов показали свои возможности в преодолении препятствий, водных преград, стрельбы по мишеням, а по ряду показателей превзошли существующие пилотируемые боевые машины.
Данная статья опубликована в рамках выполнения проекта грантового финансирования ИРН 00077/ГФ- ДСП-20 на тему: «Разработка наземного, многоцелевого робототехнического комплекса с применением искусственного интеллекта».
Ключевые слова: боевые наземные робототехнические средства, мотострелковое подразделение, общевойсковой бой, наступление, оборона.
Түйіндеме. Мақалада жаяу əскер жауынгерін ұрыс алаңына ішінара ауыстыру үшін жердегі робототехникалық құралдарды мотоатқыштар бөлімшелеріне біріктіру қажеттілігі негізделген. Мотоатқыштар бөлімшесінің құрамындағы тапсырмаларды сапалы орындау үшін жердегі роботты техниканың прототипі болуы керек тактикалық жəне техникалық сипаттамалар ұсынылған. Мотоатқыштар бөлімшелерінің құрамында шабуылдаушы жəне қорғаныс шайқастарында жердегі робототехникалық құралдарды қолдану нұсқалары қарастырылды. Мотоатқыштар бөлімшелерінің құрамындағы жауынгерлік ТҚТК шабуыл кезінде де, қорғаныстық ұрыс кезінде де қолданылуы мүмкін. Сонымен қатар, сынақ нəтижелері бойынша жауынгерлік роботтардың отандық үлгілері кедергілерді, су кедергілерін, нысана бойынша атуды жеңуде өз мүмкіндіктерін көрсетті, ал бірқатар көрсеткіштер бойынша қолданыстағы басқарылатын жауынгерлік машиналардан асып түсті.
Түйінді сөздер: жердегі жауынгерлік робот техникасы, мотоатқыштар бөлімшесі, жалпы əскери ұрыс, шабуыл, қорғаныс.
Abstract. The article substantiates the need to integrate combat ground-based robotics into motorized rifle units to partially replace an infantryman on the battlefield. The tactical and technical characteristics that a prototype of a combat ground-based robotic means should possess for the qualitative performance of tasks as part of a motorized rifle unit are proposed. The variants of the use of ground-based robotic combat vehicles as part of motorized rifle squads in offensive and defensive combat are considered. Combat NRTS as part of motorized rifle units can be used both in offensive and defensive combat. At the same time, according to the test results, domestic models of combat robots showed their capabilities in overcoming obstacles, water obstacles, target shooting, and in a number of indicators surpassed existing manned combat vehicles.
Key words: combat ground-based robotic means, mechanized infantry units, combined arms combat, offensive, defense.
Современные реалии таковы, что в военном строительстве следует готовиться к «будущей» войне, то есть учитывать все новейшие факторы победы, которыми консервативные генералы склонны пренебрегать [1].
Несмотря на кардинальные изменения в концепциях ведения боевых действий (сетецентрическая, информационная и др.), руководящие документы по подготовке и ведению общевойскового боя не редактировались довольно давно [2].
Военное руководство стран НАТО рассматривает роботизацию сухопутной техники как магистральное направление развития средств вооруженной борьбы. В соответствии с планами военно-политического руководства США к 2035г. будут созданы полностью автономные наземные робототехнические средства (НРТС), способные работать в едином информационном пространстве ведения боевых действий, эффективно и безопасно взаимодействовать между собой и с человеком. А в дальнейшем (после 2045 г.) ожидается почти полное выведение человека с переднего края поля боя с передачей НРТС функций на применение оружия [3].
Основной задачей НРТС является замена человека в ситуациях, связанных с риском для жизни (разведка, разминирование, эвакуация раненых и пр.). Задача боевых НРТС, кроме этого, состоит в повышении эффективности и качества выполнения боевой задачи за счет практически полного исключения человеческого фактора на поле боя. Широкомасштабное развитие мировой военной робототехники, в целом, и принятие на вооружение армиями ведущих иностранных государств боевых НРТС, в частности, с одной стороны, и отсутствие четкой позиции боевых роботов в организационно-штатной структуре мотострелковых подразделений, с другой стороны, предполагает определение места и роли боевых НРТС в штатных воинских подразделениях. Особенно актуальной эта задача рассматривается в контексте полной или частичной замены солдата-пехотинца мотострелкового подразделения при проведении наступательной или оборонительной операции [6].
Сухопутные войска, а именно пехота, являются одним из самых затратных по личному составу родов войск. Потери в живой силе здесь наиболее вероятны и велики. Поэтому принятие на вооружение боевых НРТС в мотострелковые подразделения подкрепляются следующими аргументами: потери в живой силе уменьшатся, а боевые возможности подразделений, наоборот, увеличатся.
В подтверждение позиции замены человека на боевое НРТС, кроме этических соображений, говорит тот факт, что «содержать» бойца намного накладнее [7–9]. Кроме этого, следует отметить, что солдат, в отличие от НРТС, обладает рядом недостатков, характеризуемых так называемым «человеческим фактором»: он может быть уставшим, больным, может дезертировать с поля боя, наконец. Робот же от всего этого ограничен.
Таким образом, при учете того, что стоимость производства одного боевого НРТС будет постепенно уменьшаться, а количество единиц такого рода техники, поступающих в войска, будет увеличиваться, то выигрыш робота по сравнению с живым солдатом будет как во времени, так и в содержании.
Следовательно, при внедрении боевых НРТС в мотострелковое подразделение, нужно решить следующие задачи: какими характеристиками они должны обладать, какие функции они будут выполнять в боевых порядках войск, как они будут управляться, и каким образом будет производиться целеуказание и ведение огня.
По мнению авторов, боевые НРТС должны обладать тактико-техническими характеристиками (ТТХ), указанными в (таблице 1).
Таблица 1 – ТТХ прототипа боевого НРТС (вариант)
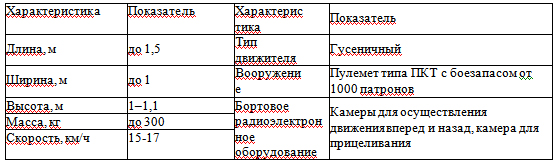
Среди них:
- габариты, позволяющие солдату укрыться, и вес, чтобы в случае застревания или переворачивания пара бойцов могла бы «поставить на ноги» робота;
- скорость, способная боевым НРТС «держать строй» с бегущими солдатами в наступательном бою при установленной полуавтоматической системе управления;
- иметь вооружение, способное осуществлять поражение живой силы и техники противника (например, пулемет типа ПКТ), работающее в сочетании с системами распознавания целей, «свой-чужой» и методом открытия огня по лазерному целеуказанию солдата
- запас хода (заряд аккумуляторных батарей) должен быть таким, чтобы «выдержать» полноценный наступательный или оборонительный бой (не менее 12 ч), и др.
По заявленным характеристикам подходят боевой РТ комплекс «Платформа-М», разработка которого велась в ОАО «НИТИ «Прогресс» по заказу Минобороны России и MAARS (Modular Advanced Armed Robotic System – модульная перспективная вооруженная робототехническая система) от американской компании Foster- Miller (таблица 2) [4].
Таблица 2 – ТТХ прототипа боевого НРТС (вариант)
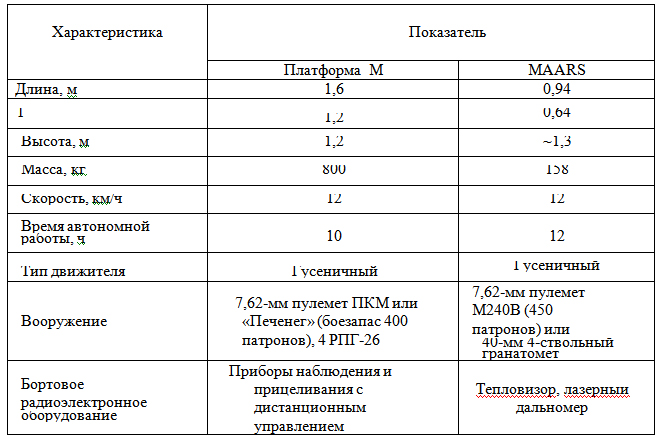
MAARS слишком легок и неустойчив для гусеничного боевого робота, а запаса патронов вряд ли хватит на полноценный общевойсковой бой. Отечественный боевой робот по своим характеристикам выглядит, на наш взгляд, предпочтительнее своего зарубежного «коллеги». Несмотря на практически аналогичный боезапас (400 патронов), габариты «Платформы-М» близки к идеальным заявленному нами прототипу. Решить проблему увеличенной массы (она на 500 кг больше заявленной) можно с помощью нескольких способов: убрать с турели целых четыре гранатомета РПГ-26, стальной корпус заменить алюминиевым с вставками из композитных материалов в передней части робота и уменьшить его ширину и высоту. Если вследствие уменьшения массы робота удастся увеличить его скорость до 15–17 км/ч, то получится идеальное боевое НРТС для интеграции в подразделения Сухопутных войск.
Авторами предлагается внедрять боевые НРТС в штаты мотострелковых подразделений из расчета по 2 робота в каждое мотострелковое отделение (мсо). Следовательно, в каждом взводе будет по 6 НРТС, а в роте – 18. Не обязательно полностью заменять бойцов роботами. Допустим, что по одному человеку с мсо (например, пулеметчиков) можно переквалифицировать, и из их числа создать ремонтное отделение на базе, скажем, МТ-ЛБ. Отделение будет состоять из командира отделения, механика-водителя и 7 техников- операторов, которые будут осуществлять обслуживание и ремонт боевых НРТС, их управление в экстренных ситуациях и, в крайнем случае, эвакуацию. В кабине машины можно будет установить несколько пультов управления для «заблудившихся» или застрявших роботов, а в кузове можно перевозить ЗИП.
Если позволит грузоподъемность МТ-ЛБ, то на ее раме можно закрепить пару запасных боевых НРТС или одного тылового робота-эвакуатора.
Одной из важных задач, которую необходимо решить при интеграции боевых НРТС в мотострелковые подразделения – это управление. На сегодняшний момент до 80 % боевых НРТС являются дистанционно управляемыми (по кабелю, по радиоканалу или по каналам спутниковой связи). Следовательно, оператор или находится в непосредственной близости с роботом (в пределах прямой видимости), или получает картинку ограниченного ракурса с камеры робота, тем самым не видит общей обстановки. Использование полностью автономных боевых НРТС на сегодняшний момент кажется весьма фантастическими. Не обладает пока робот таким интеллектом, чтобы участвовать с людьми наравне в условиях скоротечного общевойскового боя. Да и доверять ему самостоятельно принимать решение на применение оружия очень опасно. Наш вариант – полуавтоматическая система управления, которая работает по принципу «следуй рядом со мной». То есть боевой робот движется между двумя солдатами-пехотинцами, координаты нахождения которых поступают ему в режиме реального времени. В крайнем случае, курс НРТС может подкорректировать ближайший боец с помощью голосовой команды, например: «Робот 1, курс 333, малый вперед».
Транспортировку боевых НРТС предлагается осуществлять в подвешенном состоянии на специальных штангах штатных машин мсо: БМП или БТР. Каждый робот крепится к этим штангам с помощью замков, открывающимися дистанционно. Если ширина и вес робота будут соответствовать заявленным, то на одной машине, не увеличивая ее поперечных габаритов, можно перевозить как раз по 2 НРТС. При этом нужно учесть, чтобы НРТС, размещенные на корпусе БМП, не мешали высадке личного состава из задних дверей десантного отделения. Перед атакой замки открываются, штанги наклоняются, роботы сползают вниз, приземляются, объезжают БМП/БТР и выдвигаются вперед (рисунок 1). На рубеже спешивания личный состав мсо десантируется и разворачивается в цепь позади роботов. Боевые НРТС движутся впереди пехоты, ориентируясь на перемещения соседних бойцов (их координаты будут передаваться роботу в режиме реального времени) [7].
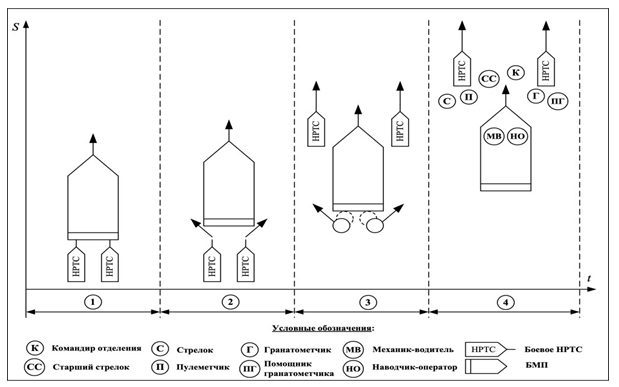
Рисунок 1 – Порядок развертывания боевых НРТС и личного состава мсо из БМП перед атакой (вариант), где 1 – Разгрузка боевых НРТС; 2 – боевые НРТС на ходу;
3 - выгрузка личного состава мсо; 4– боевые НРТС, пехота, БМП готовы к атаке
Еще одним немаловажным является вопрос применения оружия и открытия огня. При этом значительную роль играет целеуказание, то есть, кто и как это оружие будет наводить на цель. Известно несколько методов целеуказания c достоинствами и недостатками (таблица 3) [7].
Таблица 3 – Методы целеуказания
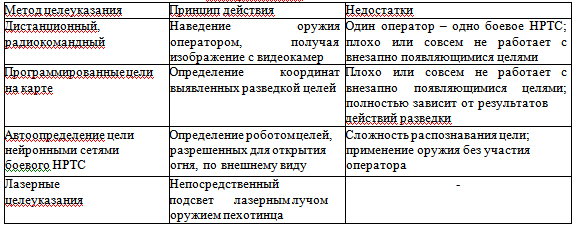
Последний метод, являющийся наиболее перспективным, не имеет существенных недостатков, а самым важным, на наш взгляд, преимуществом является то, что полностью исключена вероятность принятия решения на применение оружия роботом. Но реализация данного подхода требует наличия качественной шифрованной связи «солдат – боевое НРТС» и дооснащение штатного оружия пехотинцев лазерными целеуказателями и дальномерами.
Вариант применения боевых НРТС в наступлении.
До начала наступления НРТС, как и личный состав мсо, получает по средствам связи карту-схему атаки (рисунок 2).
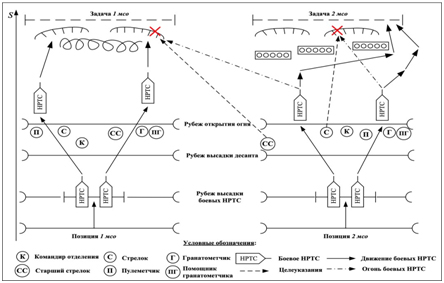
Рисунок 2 – Схема атаки двух мсо с четырьмя боевыми НРТС (вариант)
На карте-схеме в виде набора координат отмечаются: позиция мсо перед атакой; рубеж высадки и развертывания боевых НРТС; рубеж высадки десанта; рубеж открытия огня (рубеж перехода в атаку); линия обороны противника с указанием координат ведения атаки для каждого робота. На основании полученных данных НРТС выстраивает маршрут с учетом объезда препятствий и движется, ориентируясь на солдат [7].
Вариант применения боевых НРТС в обороне.
В обороне такие роботы могут занимать отдельные неглубокие капониры впереди своей пехоты, а могут вести активную оборону, например, передвигаясь и ведя огонь из-за длинных насыпей (из канав), проложенных под углом примерно 45 градусов к позиции подразделений и выступающих на 100–300 м вперед, как это показано на (рисунке 3). Такая, незамысловатая, на первый взгляд, схема обороны позволяет внести путаницу в разведданные противника о составе и расположении собственных сил и средств. К тому же боевые НРТС могут быть оперативно возвращены к основным силам мсо [7].
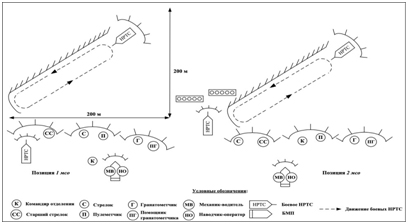
Рисунок 3 – Боевые НРТС в обороне перед основной позицией пехоты (вариант)
По результатам исследования установлено, что, не меняя штата мотострелковой роты (добавится всего одна единица техники – МТ-ЛБ), на смену 9 живым солдатам придут 18 боевых НРТС (по 2 робота в каждое мсо). Результаты компьютерного моделирования встречного боя подразделения, оснащенного боевыми НРТС, с аналогичным подразделением без них показали значительное повышение боевых возможностей (до 20 %) первых при одновременном сокращении их потерь в живой силе и военной технике [10].
Для поддержки мотострелкового подразделения в бою нужен умеренно-компактный слегка бронированный гусеничный боевой робот с пулеметом калибра 7,62-мм на турели с ограниченным сектором обстрела (для безопасности, наступающей сзади пехоты). Такой робот должен иметь полуавтоматическую систему управления, реализуемую по принципу «следуй рядом со мной», а наведение и применение оружия должно осуществляться только под контролем солдата-пехотинца [5].
Исследованная в данной статье задача не охватывает всего объема вопросов относительно роли боевых НРТС в мотострелковых подразделениях, а также вариантов их применения в различных видах общевойскового боя. Практические выводы не являются окончательными, но есть основание полагать, что осуществление указанных в работе предложений и рекомендаций будет способствовать позитивной динамике, рассмотренной специфической и актуальной области деятельности.